先挖坑
- map中 hash冲突是怎么解决的
- map 是怎么存储数据的
- map 什么时候翻倍扩容、什么时候等量扩容
- 为什么map的遍历结果每次都不一样
本篇主要通过go hash 的实现,来填上面的坑
哈希运算
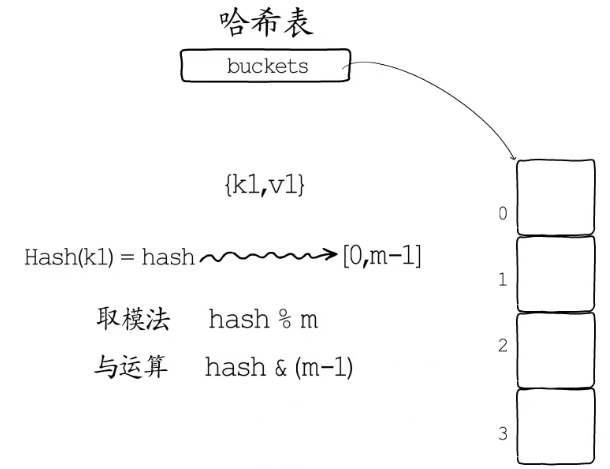
哈希运算一般就是通过hash函数计算出一个key的数值,然后用这个数值与桶(数组)的个数m取模或者与运算
go中的hash使用取模法
index := hash("author") % array.len
哈希冲突
常见hash冲突的解决方式:开放地址法和链表法
开放地址法:
在产生碰撞时,一般采用线性探测的方式,从索引的位置向后查找,到达数组末尾时,从数组开始处探测,直到找到一个空位置存储这个key
劣势:装载因子,当装载率超过 70% 之后,哈希表的性能就会急剧下降,而一旦装载率达到 100%,整个哈希表就会完全失效
装载因子 = 元素数量 ÷ 桶数量
拉链法:
一般使用数组加链表的方式,在碰撞的位置使用链表向后延伸,java中碰撞位置的链表达到一定长度会优化成红黑树
go语言中使用拉链法来解决hash碰撞
数据结构
map的源码位于 src/runtime/map.go
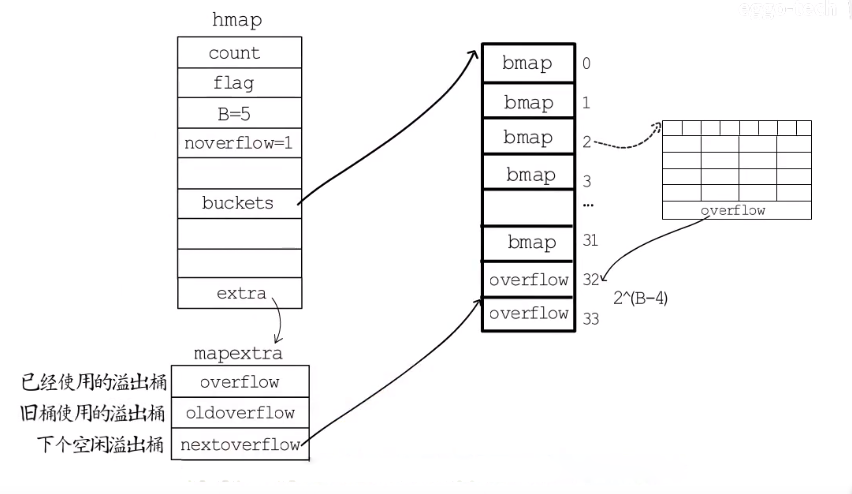
//map结构体是hmap,是hashmap的缩写
type hmap struct {
count int //元素个数,调用len(map)时直接返回
flags uint8 //标志map当前状态,正在删除元素、添加元素.....
B uint8 //单元(buckets)的对数 log_2
noverflow uint16 //单元(buckets)溢出数量
hash0 uint32 //哈希种子
buckets unsafe.Pointer //指向单元(buckets)数组,大小为2^B,可以为nil
oldbuckets unsafe.Pointer //旧桶的地址,用于扩容
nevacute uintptr //渐进式扩容进度,小于此buckets迁移完成
extra *mapextra //溢出桶
}
type mapextra struct {
overflow *[]*bmap // 现在的溢出桶
oldoverflow *[]*bmap // 旧的溢出桶
nextOverflow *bmap // 下一个溢出桶
}
type bmap struct {
tophash [bucketCnt]uint8 // 存储了键的哈希的高 8 位
//在运行期间bmap会包含以下字段,因为哈希表中可能存储不同类型的键值对,而且 Go 语言也不支持泛型,所以键值对占据的内存空间大小只能在编译时进行推
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr
overflow uintptr
}
map同样也是数组存储的的,每个数组下标处存储的是一个bucket,每个bucket中可以存储8个kv键值对,当每个bucket存储的kv对到达8个之后,会通过overflow指针指向一个新的bucket,从而形成一个链表
map扩容规则
翻倍扩容
go语言中map默认负载因子为6.5,超过以后就会翻倍扩容
count/(2^B) > 6.5
所以map中可以最多容纳 6.5 * 2 ^ B 个元素
等量扩容
负载因子没有超标,noverflow较多时,就会等量扩容。等量扩容就是创建和旧桶同样数目的新桶,然后把原来的键值对迁移到新桶中,减少溢出桶的使用,说白了就是很多键值对被删除的情况下进行rehash
noverflow 的阈值
B<=15 时 noverflow >= 2^B
B>15 时 noverflow >= 2^15
为什么遍历 Go map 是无序的
for range map 汇编
...
0x009b 00155 (main.go:11) LEAQ type.map[int32]string(SB), AX
0x00a2 00162 (main.go:11) PCDATA $2, $0
0x00a2 00162 (main.go:11) MOVQ AX, (SP)
0x00a6 00166 (main.go:11) PCDATA $2, $2
0x00a6 00166 (main.go:11) LEAQ ""..autotmp_3+24(SP), AX
0x00ab 00171 (main.go:11) PCDATA $2, $0
0x00ab 00171 (main.go:11) MOVQ AX, 8(SP)
0x00b0 00176 (main.go:11) PCDATA $2, $2
0x00b0 00176 (main.go:11) LEAQ ""..autotmp_2+72(SP), AX
0x00b5 00181 (main.go:11) PCDATA $2, $0
0x00b5 00181 (main.go:11) MOVQ AX, 16(SP)
0x00ba 00186 (main.go:11) CALL runtime.mapiterinit(SB)
0x00bf 00191 (main.go:11) JMP 207
0x00c1 00193 (main.go:11) PCDATA $2, $2
0x00c1 00193 (main.go:11) LEAQ ""..autotmp_2+72(SP), AX
0x00c6 00198 (main.go:11) PCDATA $2, $0
0x00c6 00198 (main.go:11) MOVQ AX, (SP)
0x00ca 00202 (main.go:11) CALL runtime.mapiternext(SB)
0x00cf 00207 (main.go:11) CMPQ ""..autotmp_2+72(SP), $0
0x00d5 00213 (main.go:11) JNE 193
...
Go map 循环迭代的是两个 runtime 方法
- runtime.mapiterinit
- runtime.mapiternext
func mapiterinit(t *maptype, h *hmap, it *hiter) {
...
it.t = t
it.h = h
it.B = h.B
it.buckets = h.buckets
if t.bucket.kind&kindNoPointers != 0 {
h.createOverflow()
it.overflow = h.extra.overflow
it.oldoverflow = h.extra.oldoverflow
}
r := uintptr(fastrand())
if h.B > 31-bucketCntBits {
r += uintptr(fastrand()) << 31
}
it.startBucket = r & bucketMask(h.B)
it.offset = uint8(r >> h.B & (bucketCnt - 1))
it.bucket = it.startBucket
...
mapiternext(it)
}
在这段代码中,fastrand()是个随机数生成方法。用于决定从哪里开始循环迭代。更具体的话就是根据随机数,选择一个桶位置作为起始点进行遍历迭代
因此每次重新 for range map,见到的结果都是不一样的。那是因为它的起始位置根本就不固定!
func mapiternext(it *hiter) {
...
for ; i < bucketCnt; i++ {
...
k := add(unsafe.Pointer(b), dataOffset+uintptr(offi)*uintptr(t.keysize))
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+uintptr(offi)*uintptr(t.valuesize))
...
if (b.tophash[offi] != evacuatedX && b.tophash[offi] != evacuatedY) ||
!(t.reflexivekey || alg.equal(k, k)) {
...
it.key = k
it.value = v
} else {
rk, rv := mapaccessK(t, h, k)
if rk == nil {
continue // key has been deleted
}
it.key = rk
it.value = rv
}
it.bucket = bucket
if it.bptr != b {
it.bptr = b
}
it.i = i + 1
it.checkBucket = checkBucket
return
}
b = b.overflow(t)
i = 0
goto next
}
mapiternext 进行具体的循环遍历动作。该方法主要涉及如下:
- 从已选定的桶中开始进行遍历,寻找桶中的下一个元素进行处理
- 如果桶已经遍历完,则对溢出桶 overflow buckets 进行遍历处理